ひずみ測定フィルターの纏め
前回、ひずみ計の発振器部分にスポットを当てた解説を致しました。
今回はひずみを測るフィルター部分に着目致します。たまたま弊社は長年、ひずみ率計の開発に携わってきたため、商品化された機器のフィルター部分の特性を比較するだけで「性能目標に合わせてどのようなフィルターを開発してきたか?」非常に分かりやすいサンプルが揃っていることに気が付きました。
今回、この機会に各ひずみ測定フィルターの特徴を整理しておくことに致します。
以下、除去特性が甘い順に並べてみました。(まずはラインナップのみ)
①UA-1A、-1B等(弊社ひずみ率計、初期モデル):LCブリッジドT型ノッチフィルター(1段)⇒周波数許容範囲±0.0065%!@-60dB
②PWHD-1(1kHz専用ひずみ測定ボード):状態変数型ノッチフィルター×2段 ⇒±0.18%@-100dB
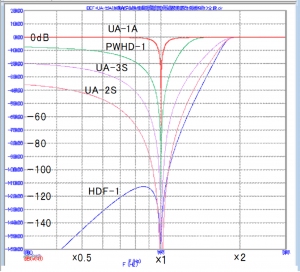
各フィルター特性の重ね描き
③UA-3S:状態変数型ノッチフィルター×3段+3次帯域制限LPF ⇒±2.0%@-100dB(-100dB=0.001%)
④UA-1S、-2S:状態変数型ノッチフィルター×4段+3次帯域制限LPF ⇒±2.3%@-140dB
⑤HDF-1:ツインTノッチフィルター×2段+2次HPF×5段+3次帯域制限LPF ⇒±1.1%@-140dB
(S/Nを向上し、周波数許容範囲を倍位に拡げたHDF-2に次ロットより入換えの予定)
⑥参考までに:帰還型ツインTノッチフィルター(±0.2dB以内@*2fn) ⇒±0.08%@-60dB(無帰還では≒±0.2%。帰還量に応じて帯域は狭くなる)
±0.8% @-40dB
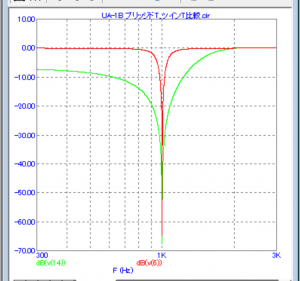
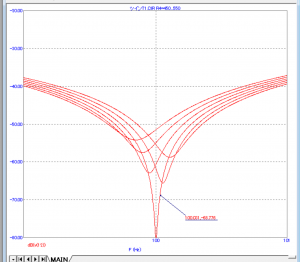
ブリッジドTと帰還型ツインTの比較(回路は後述のツインT型)
以下、各フィルターの「特徴に絞った解説」です。
①UA-1A等: ほぼLC並列共振型と理解してもよい。実回路図から探った周波数特性では⑥のツインTと比べても異様に周波数許容範囲が狭い! 計算違いか?とも思ったが実感からはこんなものかもしれない。逆にチョークコイルとの共振で-60dB以下までの特性を得ていたというのはモノ凄い!と感じる。
この共振型の面白いのは「Lに適当な直列抵抗分が無いと深いノッチは得られない」ということ。
(頑張って高価なハイQのチョークを入手するのは馬鹿らしい!・・・シミュレーションカーブを参照)
以上、今後、LC共振型の出番は殆ど無いでしょうが、技術の記録として特性を確認してみました。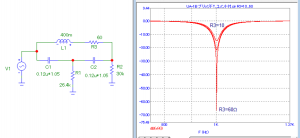
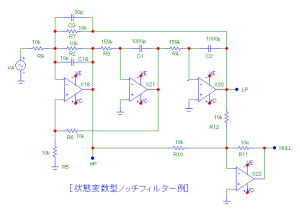
PWHD-1,UA-3S,UA-2Sの基本回路
②PWHD-1:かなり許容範囲は狭いと感じるが、1kHzのみで、しかも周波数は発振器、フィルター共、半固定VRで微調整できるので全く支障無い。(後述の理屈で常に深いノッチが維持できるので安心して周波数調整が出来るのが有難い)
5532のような低ひずみのICを使えばひずみも低く抑えられ、自作にも向いている。
(3~4個のデュアルオペアンプでふたつのノッチを設定出来る)状態変数型は各部の定数がかなり狂っていようが、シミュレーションサンプルのように必ず深いノッチが得られるメリットがある。
(積分器は正確に90度位相がズレるため、HPとLPは完全に逆相なので加算すればある周波数で必ず深いノッチが生じる)⇒計算例で違いを比較!
つまり、状態変数型はノッチを作るには最適なフィルターといえる。
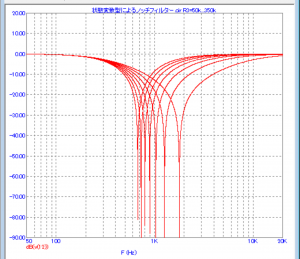
どこを変えても深いノッチが出来る状態変数型
◎状態変数型は他にもメリットは多い。
★一般的にはRf,Cfが同じ定数の組み合わせでよく、この2個の定数だけで周波数が算出できる。例えば、159kΩ×2、1000pF×2の組み合わせで同調(orノッチ)周波数が1kHzになり、慣れれば暗算で凡その定数が計算できるようになる程、分かりやすい。
★他のフィルターとは異なりフィルターのQは抵抗1本で独立して調整できる。
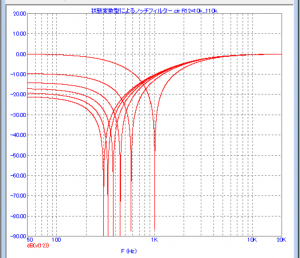
状態変数型以外はノッチの調整が大変!どこを変えてもノッチが浅くなってしまう
③UA-3S、④UA-2S等 のフィルターは全て状態変数型フィルターのみで構成されている。とくに④は不要ともいえる程許容範囲が広いため、組上げた後のノッチ周波数の調整は不要となっている。
⇒実際には通過域の肩特性の微調整のみになる。
⑤HDF-1:ツインTノッチの利点は初段のオペアンプには基本波が除去された電圧しか掛からないため、「殆ど入力アンプに依るひずみが発生しない」こと。
例えば
◎±5V動作の入力アンプでも±50V以上の基本波信号を受けることができる!
◎ひずみ率はツインTのCRの性能のみで決まる。
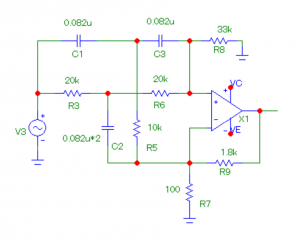
ツインT帰還型回路例
ツインT自体は単体では許容周波数範囲が狭いが次段以降を状態変数型フィルターとすることで、広い許容範囲を持たせることが可能になる。
(仮に周波数ズレの為、ツインTで30dB位しか減衰出来なくても、10Vの信号は0.3Vに抑えられ、それ以降でのひずみ発生は起きにくくなる。ただし、こういったケースではでツインTを受けるオペアンプはかなり低ひずみのものでないと問題になることがあるので要注意)